Quick links: Dataset downloads Submit Leaderboards Ask for help
 |
Approximate Supervised Object Distance Estimation Develop models for estimating object distances using monocular images captured from USVs Prize: the top team(s) will win prize(s) sponsored by Shield AI. 1st prize is an NVIDIA RTX 4080 Super, 2nd is an NVIDIA RTX 4070 Ti Super. |
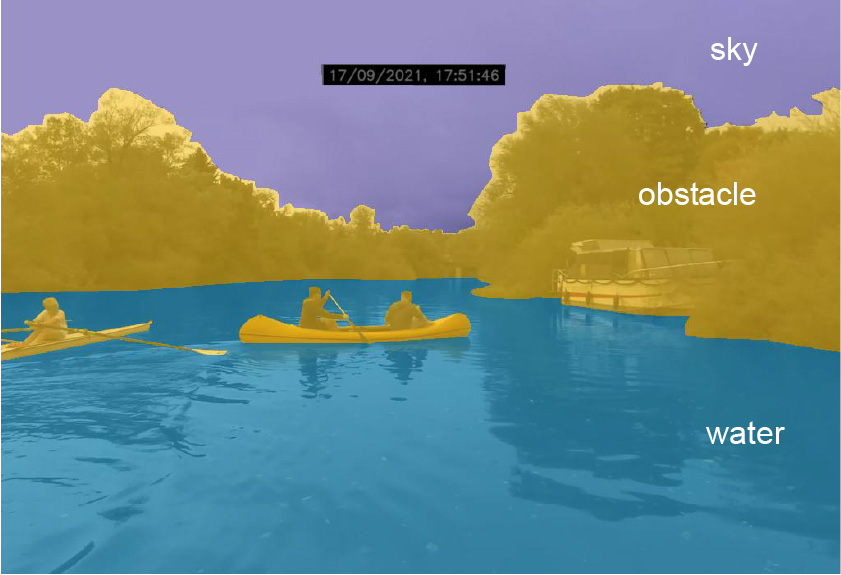 |
USV-based Obstacle Segmentation Segment a maritime image from the viewpoint of a USV into three components (water, obstacle, sky) |
 |
USV-based Embedded Obstacle Segmentation Segment a maritime image from the viewpoint of a USV in real-time on an embedded device Prize: the top team stands to win $500 worth of Luxonis devices |
|
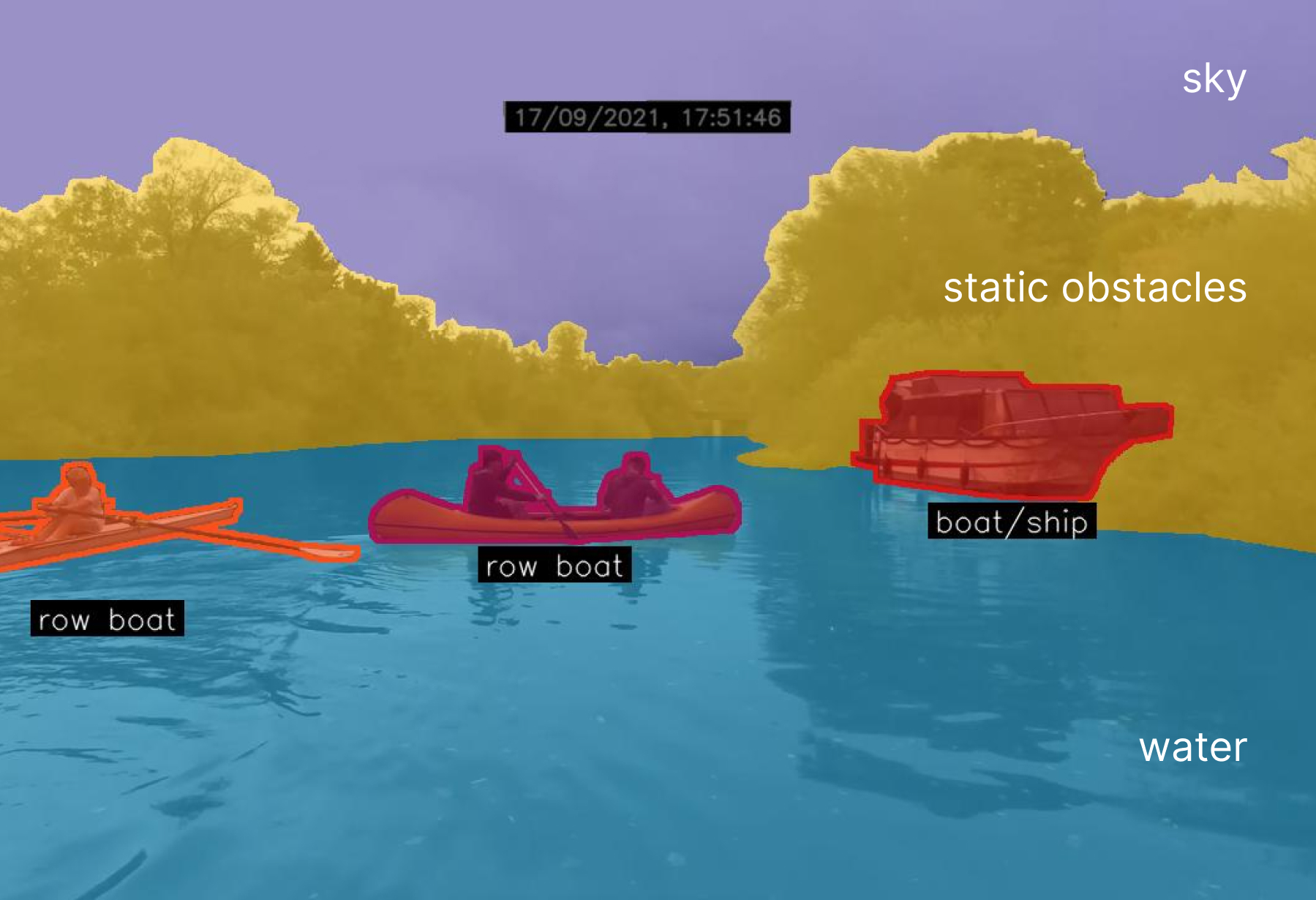
USV-based Panoptic Segmentation Parse the scene captured from the viewpoint of a USV into "stuff" classes and "thing" object instances |
|
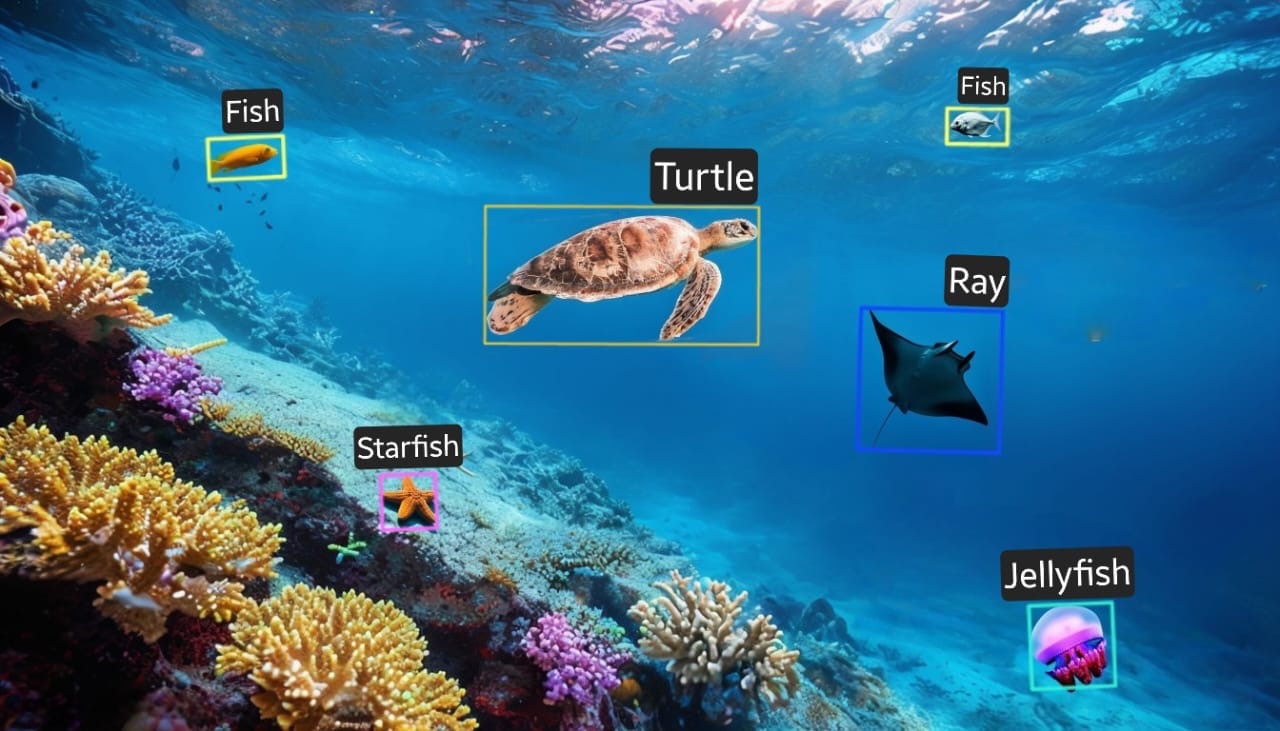
MarineVision Restoration Challenge Restore degraded underwater images and detect aquatic animal species. |